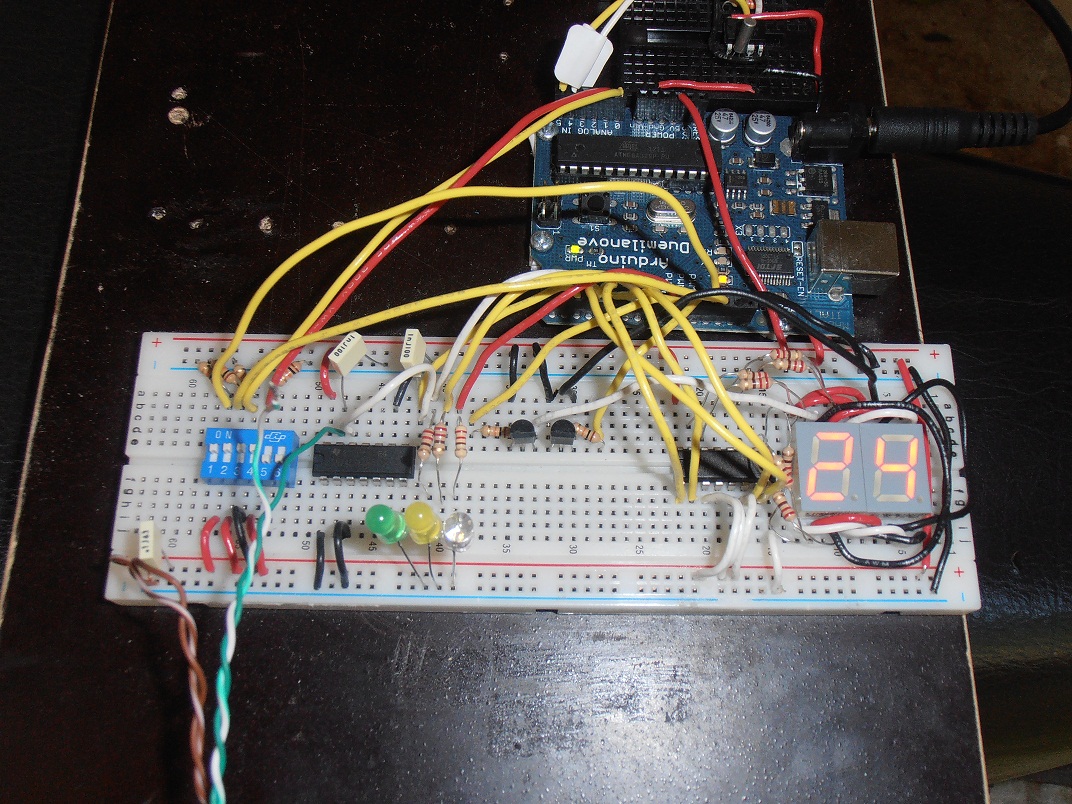
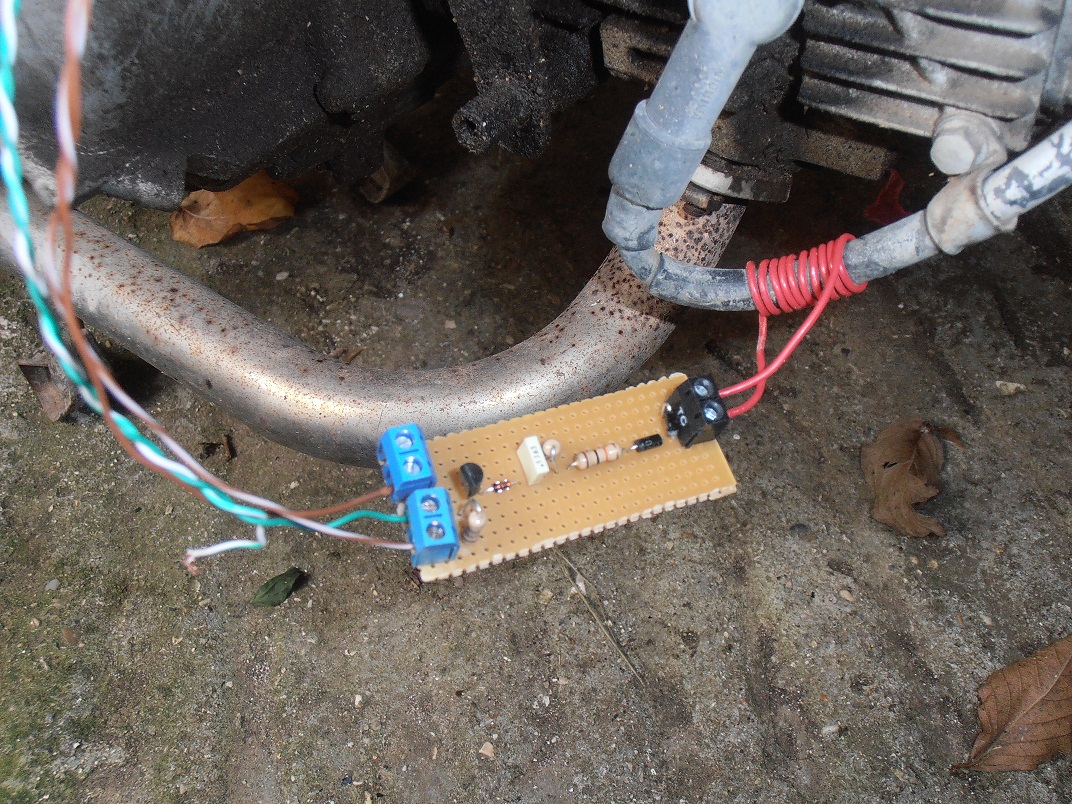
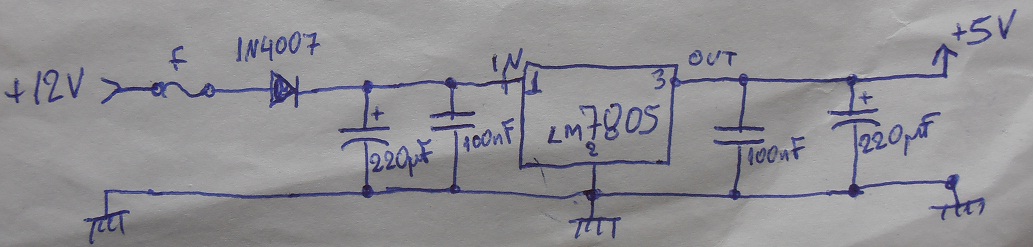
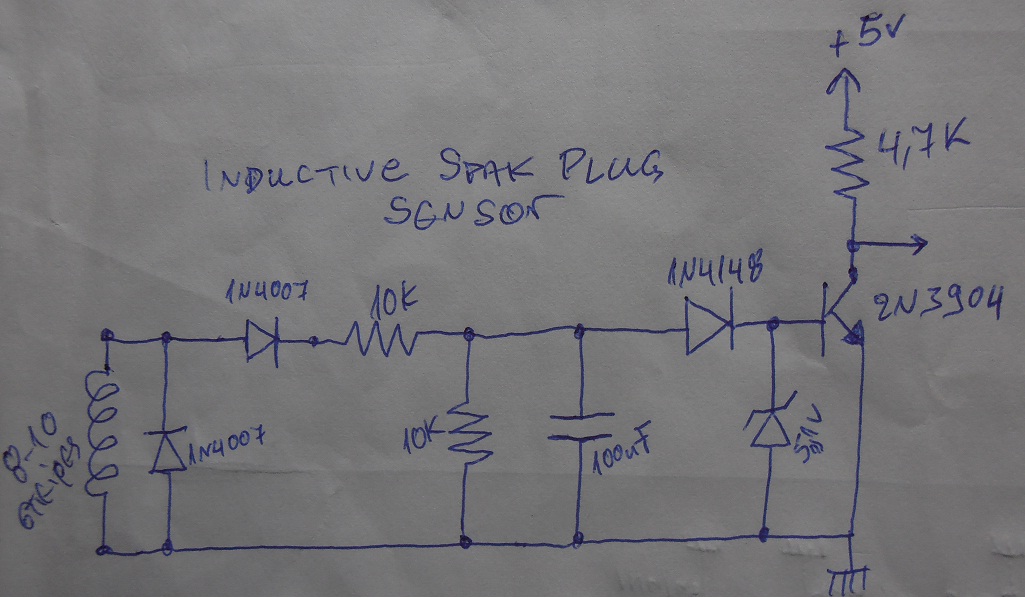
Arduino Car or Motorbike Engine RPM Meter Shift Light Inductive Spark Plug Sensor
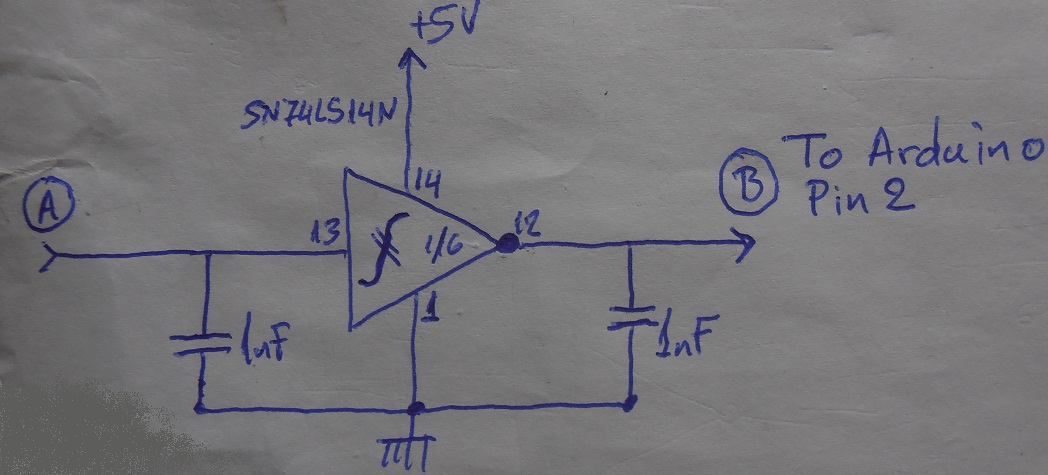
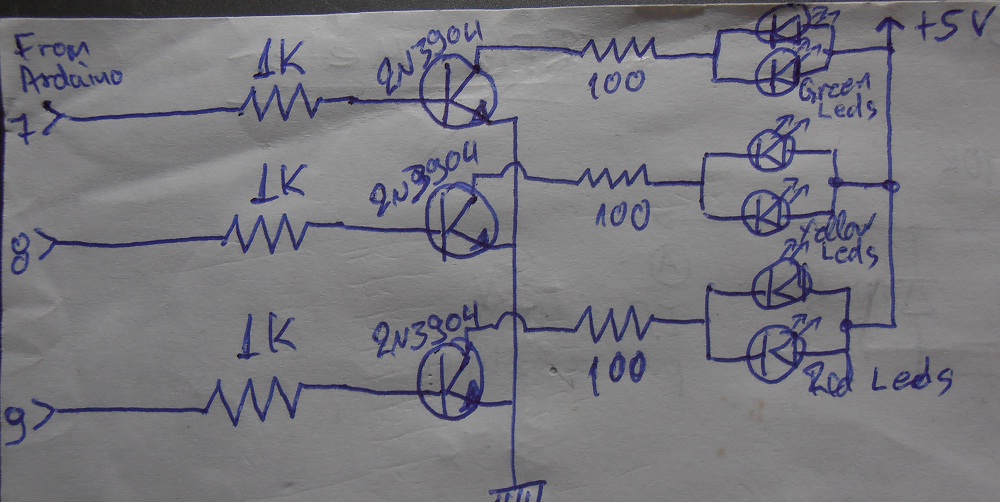
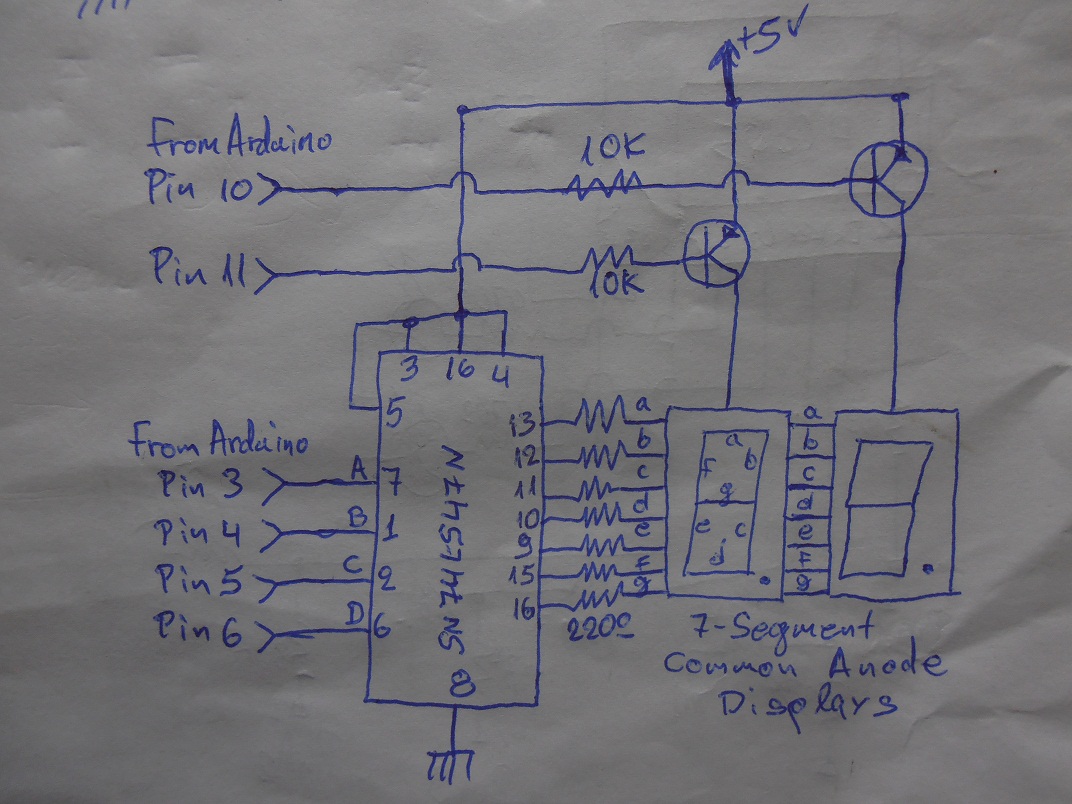
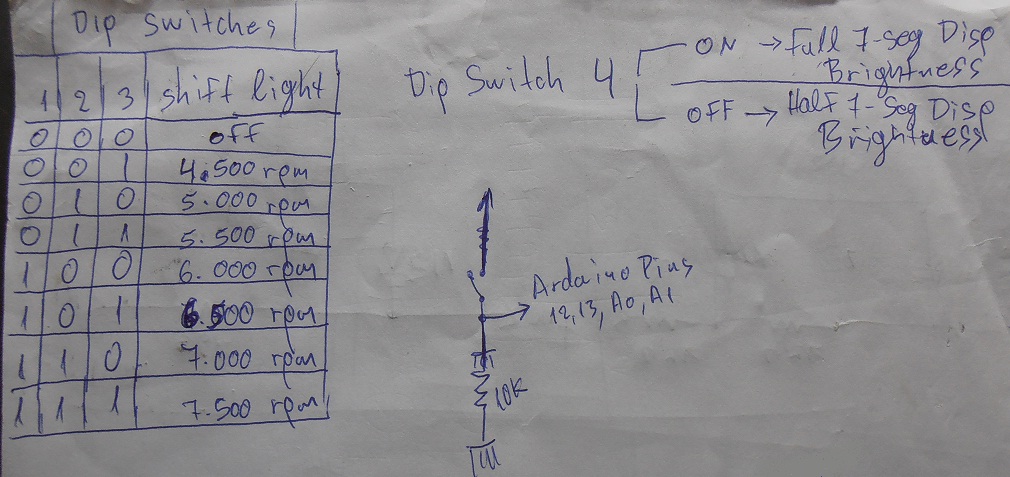
int BinaryPins[] = {3,4,5,6}; int decades; int monades; const int ignitionPin = 2; const int ignitionInterrupt = 0; const unsigned int pulsesPerRev = 1; const int ledpin_green=7; const int ledpin_yellow=8; const int ledpin_red=9; const int led_dec=10; const int led_mon=11; const int dip_sw1=12; const int dip_sw2=13; const int dip_sw3=A0; const int dip_sw4=A1; unsigned long lastPulseTime = 0; unsigned long rpm = 0; int rpm_int; int rpm_to_disp; int disp_bright; int shift_light_rpm; void setup() { Serial.begin(9600); pinMode(3, OUTPUT); pinMode(4, OUTPUT); pinMode(5, OUTPUT); pinMode(6, OUTPUT); pinMode(ledpin_green, OUTPUT); pinMode(ledpin_yellow, OUTPUT); pinMode(ledpin_red, OUTPUT); pinMode(led_dec, OUTPUT); digitalWrite(led_dec,HIGH); pinMode(led_mon,OUTPUT); digitalWrite(led_mon,HIGH); pinMode(ignitionPin, INPUT); attachInterrupt(ignitionInterrupt, &ignitionIsr, RISING); pinMode(dip_sw1,INPUT); //----------------------------- pinMode(dip_sw2,INPUT); //shift light rpm configuration pinMode(dip_sw3,INPUT); //----------------------------- pinMode(dip_sw4,INPUT); //on=full brightness of 7-segments----off=low brightness of 7 segments if (digitalRead(dip_sw4)==HIGH) disp_bright=0; else disp_bright=200; chk_dips(); demo(); digitalWrite(ledpin_green,LOW); digitalWrite(ledpin_yellow,LOW); digitalWrite(ledpin_red,LOW); } void demo(){ for(int i=0;i<10;i++){ if (i==3) digitalWrite(ledpin_green,HIGH); if (i==5) digitalWrite(ledpin_yellow,HIGH); if (i==8) digitalWrite(ledpin_red,HIGH); for(int j=0;j<10;j++){ sevenSegWriteDec(i); delay(10); sevenSegWriteMon(j); delay(10); } } for(int i=9;i>-1;i--){ if (i==3) digitalWrite(ledpin_green,LOW); if (i==5) digitalWrite(ledpin_yellow,LOW); if (i==8) digitalWrite(ledpin_red,LOW); for(int j=9;j>-1;j--){ sevenSegWriteDec(i); delay(10); sevenSegWriteMon(j); delay(10); } } } void ignitionIsr() { unsigned long now = micros(); unsigned long interval = now - lastPulseTime; if (interval > 5000) { rpm = 60000000UL/(interval * pulsesPerRev); lastPulseTime = now; //rpm_int=int(rpm); } } void sevenSegWriteDec(int digit) { if (digit>0) analogWrite(led_dec,disp_bright); else digitalWrite(led_dec,HIGH); digitalWrite(led_mon,HIGH); for (byte i = 0; i < 4; ++i) { int dec_val=digit&1; digitalWrite(BinaryPins[i],dec_val); digit=digit>>1; } } void sevenSegWriteMon(int digit) { digitalWrite(led_dec,HIGH); analogWrite(led_mon,disp_bright); for (byte i = 0; i < 4; ++i) { int mon_val=digit&1; digitalWrite(BinaryPins[i],mon_val); digit=digit>>1; } } void chk_dips(){ int dip_val; dip_val=digitalRead(dip_sw1); dip_val=dip_val << 1; dip_val=dip_val+digitalRead(dip_sw2); dip_val=dip_val << 1; dip_val=dip_val+digitalRead(dip_sw3); switch (dip_val){ case 0:shift_light_rpm=0; break; case 1:shift_light_rpm=45; break; case 2:shift_light_rpm=50; break; case 3:shift_light_rpm=55; break; case 4:shift_light_rpm=60; break; case 5:shift_light_rpm=65; break; case 6:shift_light_rpm=70; break; case 7:shift_light_rpm=75; break; } } void loop() { noInterrupts(); rpm_to_disp=int(rpm); interrupts(); if ((rpm_to_disp>399) && (rpm_to_disp<10000)){ rpm_to_disp=rpm_to_disp/100; decades=rpm_to_disp / 10; monades=rpm_to_disp % 10; sevenSegWriteDec(decades); delay(10); sevenSegWriteMon(monades); delay(10); if (shift_light_rpm>0){ if (rpm_to_disp>=shift_light_rpm-10) digitalWrite(ledpin_green,HIGH); else digitalWrite(ledpin_green,LOW); if (rpm_to_disp>=shift_light_rpm-5) digitalWrite(ledpin_yellow,HIGH); else digitalWrite(ledpin_yellow,LOW); if (rpm_to_disp>=shift_light_rpm) digitalWrite(ledpin_red,HIGH); else digitalWrite(ledpin_red,LOW); } } else { digitalWrite(led_dec,HIGH); digitalWrite(led_mon,HIGH); } } |